Designing an Autonomous Vehicle Cruise Control System Using PID Control
Innovative Arduino SolutionsDesigning an Autonomous Vehicle Cruise Control System Using PID Control
🚗 What if a vehicle could control its own speed—automatically and safely?
That’s exactly what this project is about!
In this project, we designed a Cruise Control System for an Autonomous Vehicle using a smart and simple concept called PID Control (Proportional, Integral, Derivative). It's a method widely used in industries and robotics to make systems stable and accurate.
🔧 How it works:
The vehicle has sensors to detect its current speed.
The system compares the current speed with the target speed we want.
If there’s a difference, the PID controller calculates how much to increase or decrease the speed.
It sends signals to the motor (or engine) to adjust the speed automatically—without any human input!
🧠 Why PID?
PID helps the vehicle stay at the desired speed even if the road conditions change (like going uphill or downhill). It avoids sudden jerks and makes the ride smooth.
💡 Technology Used:
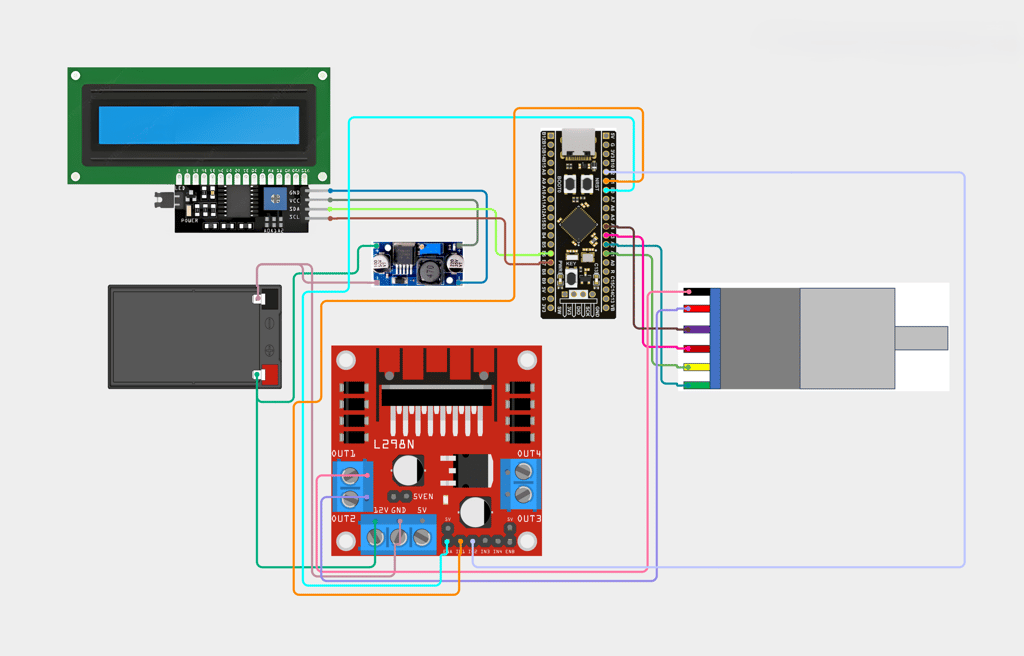
Microcontroller: STM32F401CCU6 (small but powerful brain of the system)
Sensors: For reading speed and feedback
DC Motor: To simulate vehicle movement
PID Algorithm: Tuned for best performance
🎯 Goal:
To build a basic, yet reliable cruise control system that can be a stepping stone for future self-driving vehicle technology.
This project is a great example of how control systems and embedded programming come together to solve real-world transportation challenges!
Address
111, middle street, Vaniyampatti
Srivilliputhur, TN 626125
Contacts
+91 63854 79706
gvmurugaraj@gmail.com
Subscribe to our newsletter

